
发布时间:2022-02-15 16:25:28 来源: 北华航天工业学院 康会峰





水下航行器展教仪器介绍
水下航行器是一种航行于水下的航行体,包括载人水下航行器和无人水下航行器,它能够完成水下勘探、侦测甚至是军事上的进攻防守等任务。无论在民用还是在军用上,都扮演着重要的角色。本展教仪器围绕着水下航行器科普推广,开发研制了水下航行器试验水箱、水下航行器模型、水下航行器弹体发射系统、水下航行器控制系统以及气源系统等,水下航行器试验水箱是水下航行器水下航行推进系统、弹体发射系统的载体,由蓄水箱、试验水箱两个部分组成。水下航行器模型包括水下深潜器模型、潜航器模型,潜航器模型用来展示水下航行器的上浮、下沉试验,通过水下航行器试验展示水下发射原理、水下流动等。水下航行器弹体发射系统由供气系统、控制系统、移动发射车、发射筒、储气箱等构成,本展教仪器可以实现水下航行原理、水下航行器水下发射、水下推动等原理的展示、演示以及科普。
一、水下航行展教仪器结构及原理
水下航行器展教仪器主要包括如下部分:密封水箱、加压和真空系统、水平拖拉系统、发射系统、流场显示系统、软回收系统和时间同步控制系统。密封水箱整体采用桁架式结构,在相邻侧面处,设置有加强筋板,有效增强了结构刚度和强度;水箱左右侧面设置有电源、气管和传感器等进出水箱的连接法兰和进出水箱的备用法兰,也为传感器信号、发射单元和灯光等提供密封的穿墙接口;水箱正面用有机玻璃替换钢板,提供高速摄影和PIV测量的大视窗;在水箱后面设置有进出人孔,方便设备安装和维护;在水箱顶部布设了泡沫铝夹芯板,为模型弹发射出水后提供防护。弹丸和防护层撞击时,可根据弹丸受损坏程度,改进防护层结构。密封水箱用于盛放水,模拟水下环境,之所以密封是因为液面上方空间需要抽真空。加压和真空系统包含空压机和真空泵等,空压机为发射系统内部空间充入高压气体同时也是弹丸的击发动力。真空泵用于对液面上方空间抽真空。
水平拖拉系统为发射装置的水平在轨移动提供动力,采用伺服电机通过钢丝绳拖动的方式实现水平移动控制,伺服电机拖动为基础的模型驱动方式为主要驱动力,电机经过减速器减速后,由卷扬机通过绳索驱动,借助定滑轮换向,对发射系统进行拖拽,实现发射系统水下在轨恒速移动。由于本试验模型为缩尺模型,对速度精度要求较高,因此,发射系统的移动速度为试验系统设计的核心指标之一。
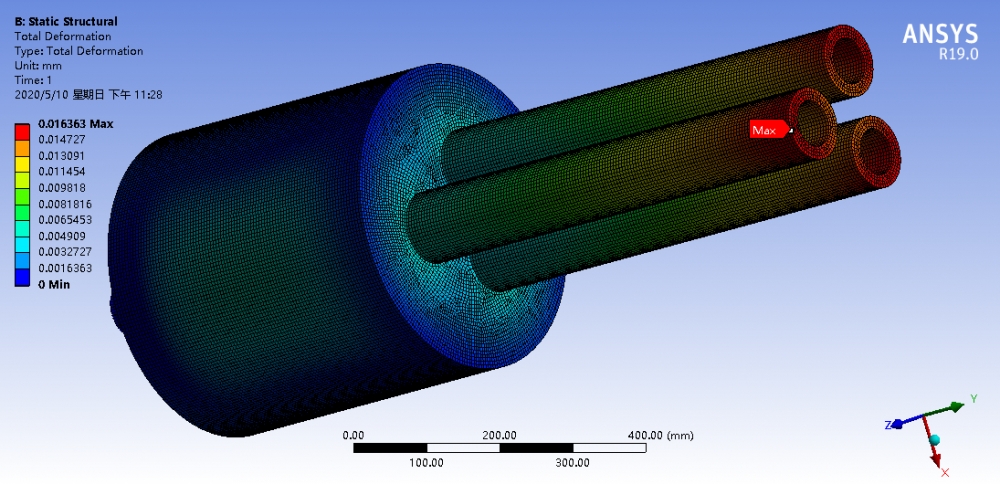
发射系统采用气动发射技术,内部设置有三个分割气室,对应三个发射筒,三个发射管集成在底部基座上,发射基座安装在滑块上,滑块安装在光轴导轨上,依靠水平拖拉系统,推动集成后的发射系统往左侧移动。每个弹丸由快速阀释放高压空气并驱动弹丸,弹丸上安装的底部O型密封圈经过发射筒格栅位置时,分割的气室分别将各自发射筒的弹丸推出,各发射筒的控制互相不关联,具体结构如图1所示。

图1 发射系统结构示意图
流场显示系统包括高速摄影和PIV测量,目的是观察弹丸出筒、出水等物理过程;为研究发射筒口的扰流流场,需进行PIV测量,得到弹丸出口附近的速度场。
高速摄影包括光源和成像系统,光源由位于试验水箱内的LED等组成,成像系统主要是带有长焦镜头的CCD相机。相机外触发TTL电平端口和发射系统通过时间同步控制组成。
PIV测量需要采用激光器、片光展开系统和CCD相机组成,其中粒子需要试验前预先均匀播散在水中。由于水流场对片光的扰动,需要增大片光强度以获得清晰片光的粒子Mie散射照片。在水箱右侧壁面典型位置布置光筒,将光束自右侧进入光筒,在光筒左侧装有带密封件的光学玻璃或有机玻璃。通过左右移动光筒,就可以实现在预定显示流场位置布置片光。光筒右侧和导轨滑块连接,这样可以保证光筒可自由地左右移动。

图2 PIV测量激光光路
软回收系统是为了对发射系统进行减速控制,实现软着陆,避免与水箱左侧内壁面发生冲击碰撞,造成水箱设备的损坏,其工作原理是当带有剩余速度和动能的发射系统继续向左运动时,压迫带侧向孔的水阻尼缸运动,将水阻尼缸内的水挤向侧面,其反力使发射系统减速。
二、仪器操作界面介绍
1.控制面板介绍
仪器控制界面如图3所示,包括水泵控制、发射、发射速度设置、电机控制等。控制模式包括手动控制、自动控制等,其中图4为参数设置界面,图5为手动模式界面,图6为自动模式界面。

图3 控制模式界面
手动速度:点击“前进”或“后退”,小车往前或往后移动,移动的速度即为所示的手动速度;
发射速度:小车由静止开始加速,到达这个速度后匀速移动;
加速时间:小车从静止到达到发射速度的时间。

图4 参数设置界面
电机1转前进:这个参数建议不要轻易改动,这是通过卷扬机直径和电机减速比等参数算出来的,跟内部PLC程序的参数挂钩,用来调速,改动会导致其他参数都乱了,无法正常调速。
小车最大行程:对小车行进距离进行限制,当达到设置的距离后,电机停转,小车向前滑动,类似于限位开关;
发射延迟:启动后,经“发射延迟”的时间后发射第一枚炮弹;
发射间隔:发射第一枚炮弹后经“发射间隔”的时间后发射第二枚炮弹;
阀1开启:用于1号发射筒内弹丸击发的触发电磁阀的控制,完成1号发射筒弹丸发射的命令。
阀2开启:用于2号发射筒内弹丸击发的触发电磁阀的控制,完成2号发射筒弹丸发射的命令。

图5 手操模式界面
图5所示为实验平台的手动模式,即每个按钮仅完成一项指令。具体操作按钮的意义如下:
照明1:打开底层照明灯。
照明2:打开上层照明灯。
PIV:启动PIV流场显示系统。
气动助推:相应的气动阀门打开,利用高压空气辅助推动小车。
复位:各机动控制点恢复到最初的状态。
弹1发射:控制发射弹丸1。
弹2发射:控制发射弹丸2。
弹3发射:控制发射弹丸3。
控制模式:实现手动模式和自动模式的切换。
2.气路控制面板介绍
气路控制面板如图6所示。

图6 气路控制面板
右侧表为数字压力表,显示气路中的压力。压力表与气路之间通过名为“表”的手动阀连接,处于开的状态后表与气路连同。左侧泵的手动阀用于连接气源泵。
最上层的四个手动阀分别为放气、3#、真空表、2#,其中2#和3#分别表示为2号和3号气罐充气,真空表与真空计连接,用于检测真空度。中间一行为击发手动阀,包含2#、3#、水箱、真空泵(气罐)。2#、3#表示该阀实现2号和3号发射筒弹丸的击发,水箱对应阀表示连接水箱顶部区域,用于抽真空,真空泵对应阀门连接真空泵,用于抽真空。也可连接气罐用于给气室供气。左下角的两个手动阀分别为“2”和“3”,用于给2号和3号发射气室充气。
三、水下航行器展教仪器操作流程
1.实验准备
(1)将小车推到发射水箱最右端,在水箱内粘贴标尺,用于对比小车位置,标定小车运行速度;
(2)关闭试验水箱舱门,打开注水开关,往水箱内注水至2.5m处;
(3)对水箱上层空间进行抽真空,真空度至指定真空度;
(4)将水下发射小车发射速度触发开关与高速摄像机触发端口设置同步,设定高速摄像机采样速率,多弹丸发射时需要设定两个弹丸发射的时间间隔;
2.实验时
(1)启动水下发射系统运行按钮;
(2)单个弹丸或者多个弹丸水下发射,高速摄影相机拍摄记录;
(3)发射车撞击到缓冲装置上,缓冲减速直到静止。
3.实验后
(1)保存实验数据,拆卸测量设备;
(2)将实验系统中的水抽到水箱中;
(3)从人孔进入到实验设备内部,取出弹丸观察,并将小车推到右侧,以备下次实验。
4、操作注意事项
(1)操作人员必须熟知仪器的性能和有关安全知识,非本岗人员严禁操作。
(2)本体上的安全附件应齐全,并且是灵敏可靠,计量仪表应经质监部门进行检验合格在有效期内。
(3)进行抽真空操作时应按工作程序进行操作,当抽真空工作完成后,再进行下一步的工作。
(4)实验前需进行计算,获得发射压力及拖动电机的运行功率。
(5)实验设备在运行过程中,要时刻观察运行状态,随时做好运行记录。设备的本体是否有肉眼可见的变形等,发现异常情况立即采取措施并报告。
地址:河北省廊坊市广阳区爱民东道133号北华航天工业学院跨气水介质飞行器重点实验室
联系人:康会峰