
发布时间:2021-08-31 10:17:13 来源: 华北科技学院 胡兴志

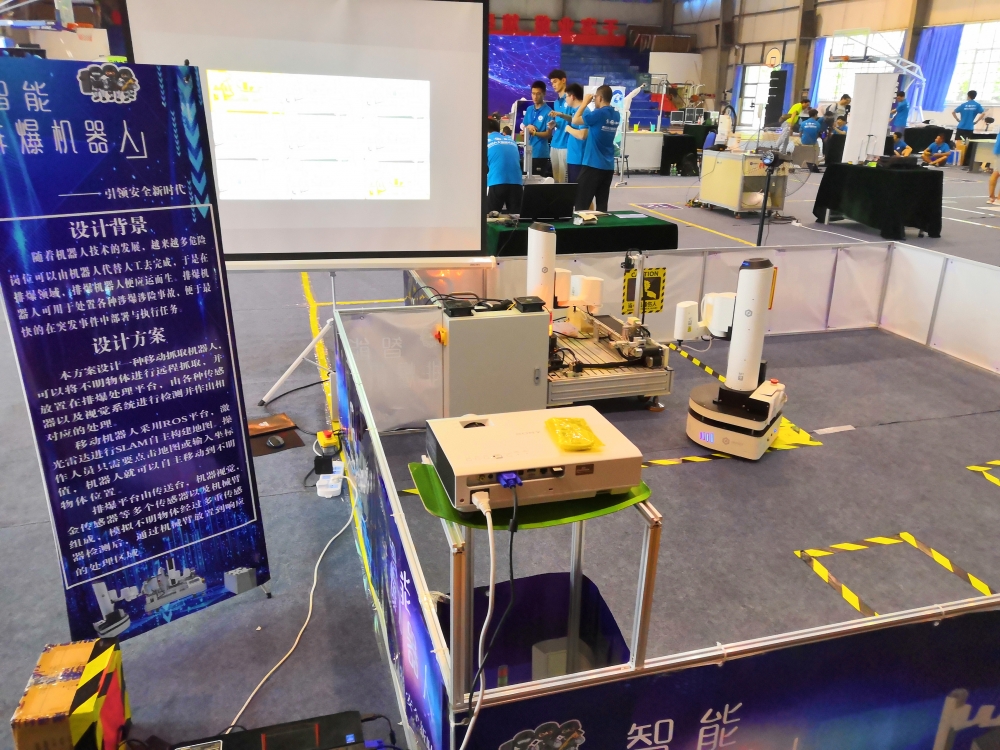
随着机器人技术的不断发展,越来越多的危险工作可以由机器人代替人工完成。在防范不明物爆炸袭击方面,人工识别和排爆危险系数极高,于是智能救援排爆机器人应运而生。
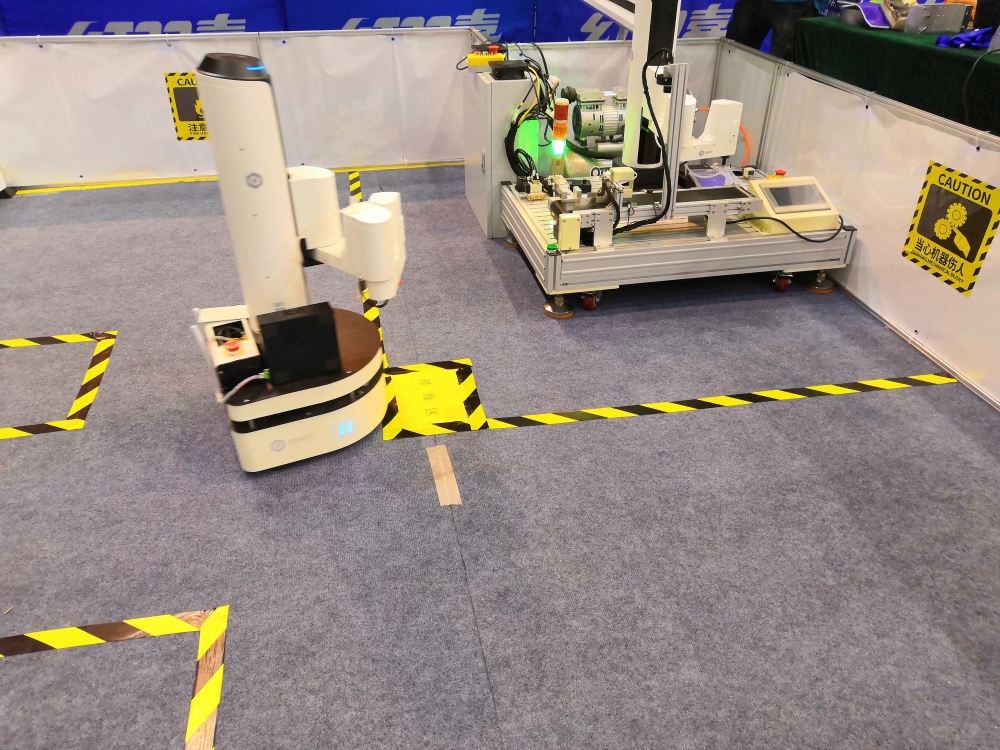
这款智能排爆救援机器人,可以自主地将不明物进行远程抓取,并将不明物放到事先设计好的排爆平台上,由各种检测设备进行检测识别,并做出相应的判断和处理。如果在排爆平台上识别到爆炸物,机器人会将爆炸物放置到安全的地方,由专业人员进行后续处理。
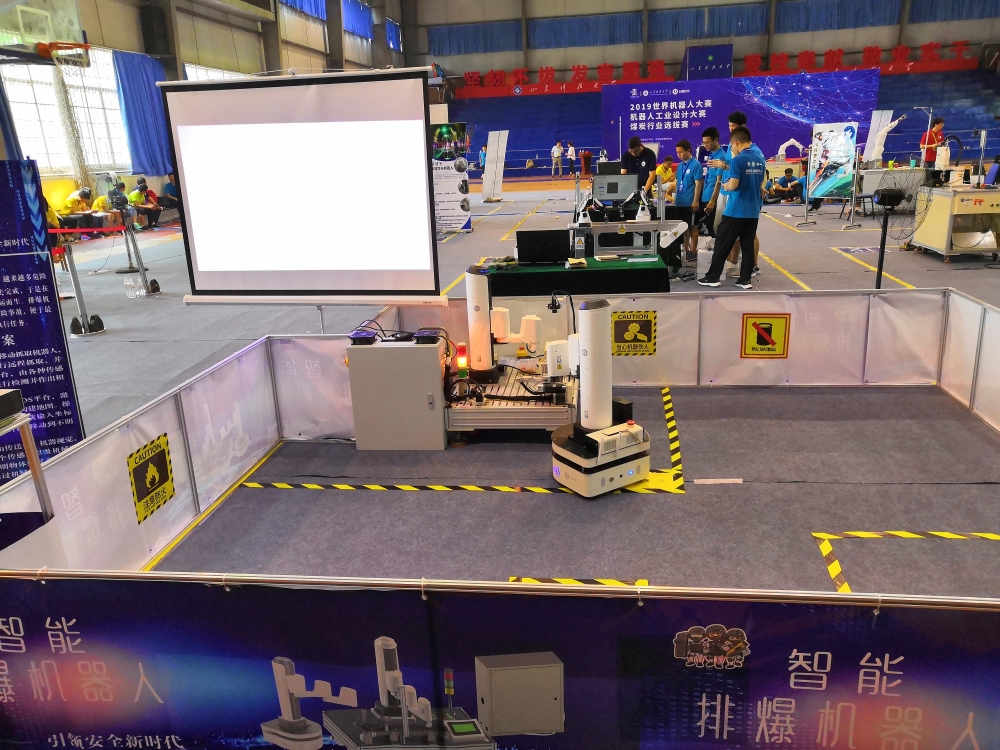
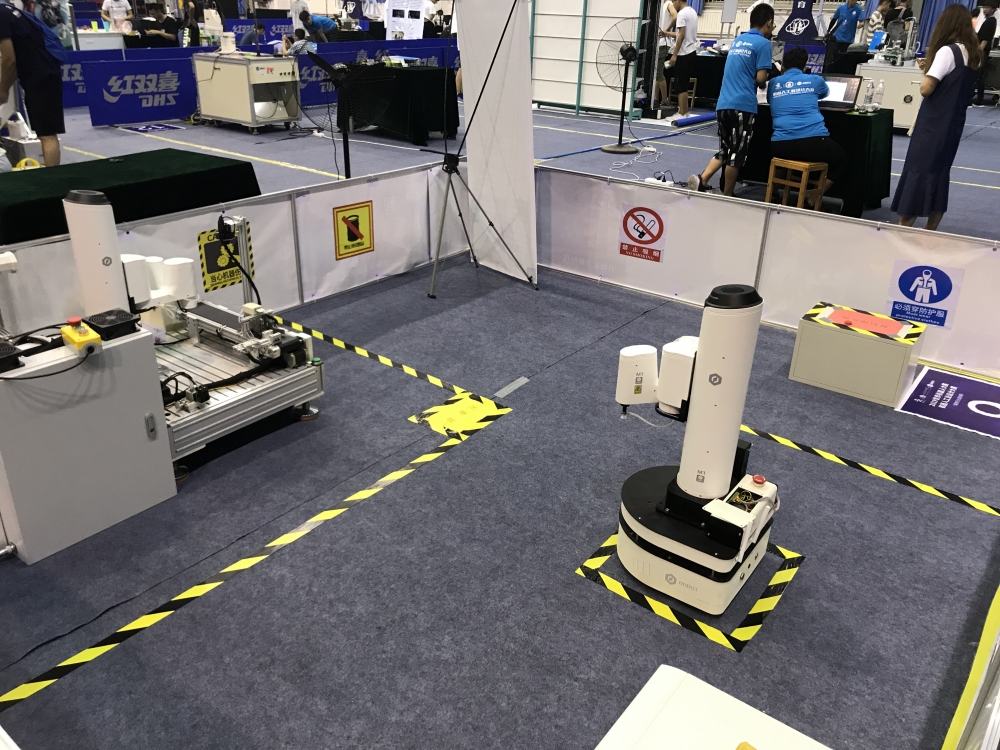
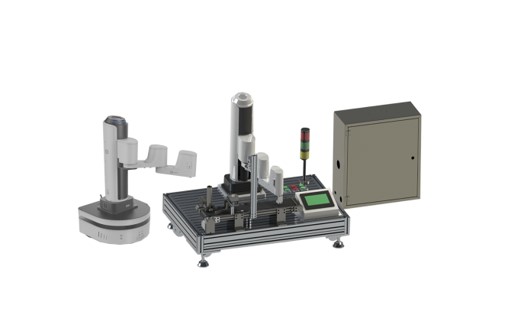
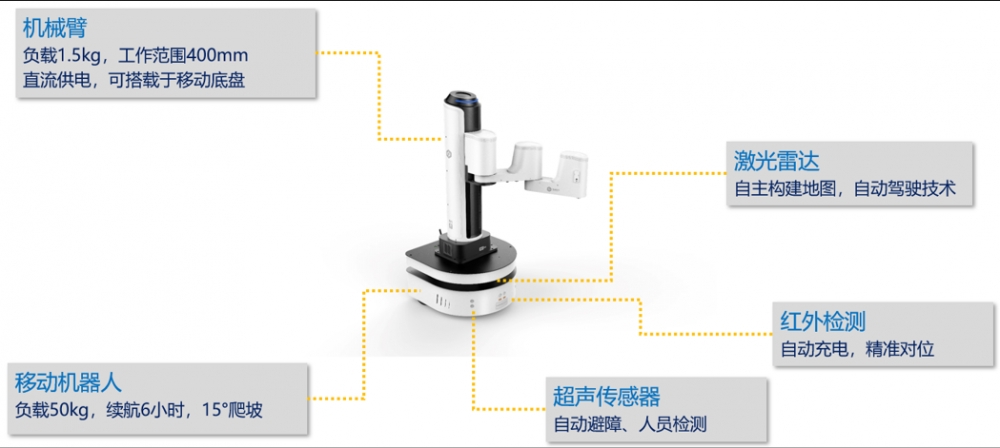
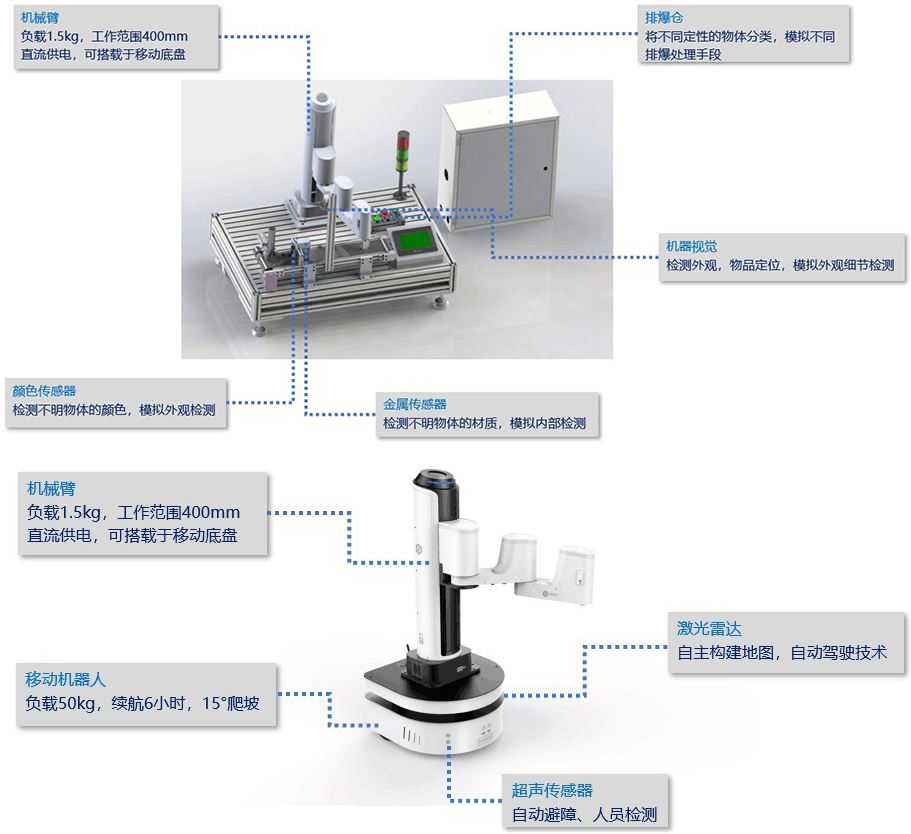
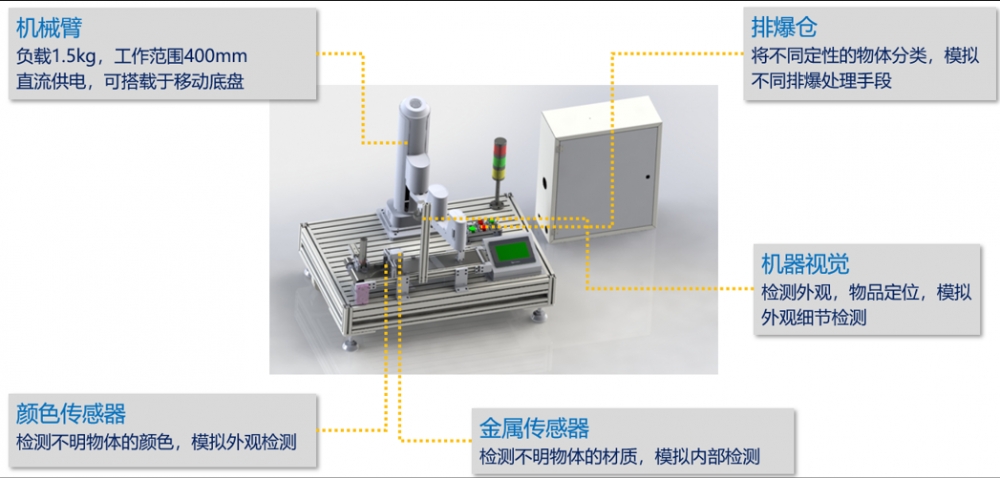
排爆机器人的构造分为两部分,即移动机器人与排爆平台。移动机器人部分采用新型的智能结构,通过激光雷达自行构建扫描地图,只需要点击地图或输入坐标值,机器人就可以自主移动到不明物位置进行捕获。排爆平台部分由传送带、金属传感器、颜色传感器、机械臂以及机器视觉系统等组成,模拟不明物经过多重传感器检测之后,由机械手放到相应的处理区域,从而完成对爆炸物的识别与分拣,为后续排爆做好准备。
简介:
采用ROS平台,借助激光雷达进行SLAM自主构建地图,自主移动抓取不明物,经过多重传感器检测判定是否有爆炸物之后,自主移动放置到相应的处理区域进行处理。
目标定位:
1、机器人分为两部分,移动机器人部分与排爆平台部分。
2、移动机器人采用ROS平台,激光雷达进行SLAM自主构建地图,只需要在计算机上点击地图或输入坐标值发出命令,机器人就可以自主移动到不明物位置。
3、排爆平台由传送带、多种传感器、满足多种视觉应用需求的机器视觉以及四轴协作型机器人组成,不明物经过多重传感器检测之后,由机械臂放置到相应的处理区域进行处理。
4、AGV最大负载50Kg,续航6小时,15°爬坡。采用Gmapping算法,通过接收到的激光雷达信息和底盘编码器反馈信息进行栅格地图的自主建图。
5、排爆平台采用西门子的S7-1200型PLC作为控制中心,控制编程软件采用西门子TIA博途。
联系地址:河北省廊坊市三河市燕郊开发区华北科技学院
联系人:胡兴志